Using Artificial Intelligence (AI) to predict and prevent machine positional error
Introduction:
The engineers at Universal Field Robots are always looking for ways to utilise artificial intelligence to improve the performance of their machines.
Challenge:
When testing the track encoders, which provide one estimate of how far the machine has driven, slip between the rubber tracks and the ground was causing positional error to accumulate at a rapid rate. Efforts in academia to produce models of slip have relied heavily on modeling friction forces and vehicle kinematics, resulting in a highly-specialised and complex system of mathematical equations.
Methodology:
UFR engineers identified that predicting slip could be done using an AI-based biologically inspired optimisation algorithm. After collecting just three minutes of driving data, and training the model for one minute, a slip paramterisation was produced that greatly increased the accuracy of the track encoder estimate.
Solution:
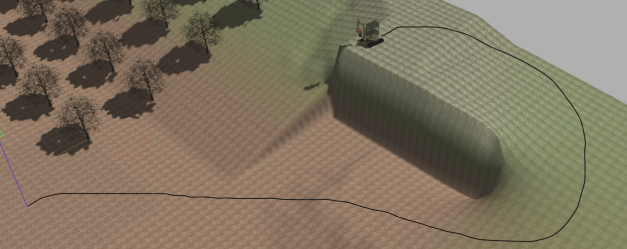
The image shows that the slip-corrected estimate maintains a very small error along the 115 metre long path, compared to the uncorrected data which drifts away rapidly. The AI-based algorithm will help UFR machines maintain a much more accurate estimate of their position when operating in areas where GPS is unavailable.